Het hangt ervan af wat voor soort stabiliteit je zoekt. Nicolas Petit schreef hier een paar jaar geleden een paper over, de onderstaande afbeeldingen zijn afkomstig van pagina 4 en 5 .
De samenvatting is dat een hoger zwaartepunt beter is voor xy positiestabiliteit, een lager zwaartepunt is beter voor snelheidsstabiliteit .
Achtergrond
Laten we, voordat we beginnen, aannemen dat we het alleen hebben over een drone die puur vooruit vliegt en dat alle dynamiek dus verband houdt met de toonhoogte. [*]
Ten tweede, laten we het zwaartepunt, het zwaartepunt, bepalen. ten opzichte van het aerodynamische centrum (vergelijkbaar met in https://aviation.stackexchange.com/questions/19388/what-is-the-difference-between-centre-of-pressure-aerodynamic-centre-and-neutra). Het aerodynamische centrum is het geïdealiseerde punt waar alle weerstandskrachten er gelijkmatig omheen werken. Met andere woorden, het kan worden gezien als de plek waar de helft van de weerstand de quadcopter roteert in een pitch-up-oriëntatie en de helft in een pitch-down-oriëntatie.
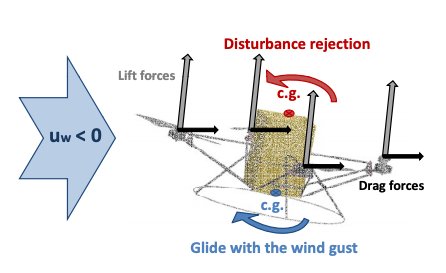
Hier is de relevante afbeelding. Het toont een voorwaartse vlucht, en dat is hetzelfde als een vlucht met een achterwaartse wind. [**] De rode pijl is voor wanneer het zwaartepunt zich boven het aërodynamische centrum bevindt en de blauwe pijl is voor wanneer het onder het aërodynamische centrum is.
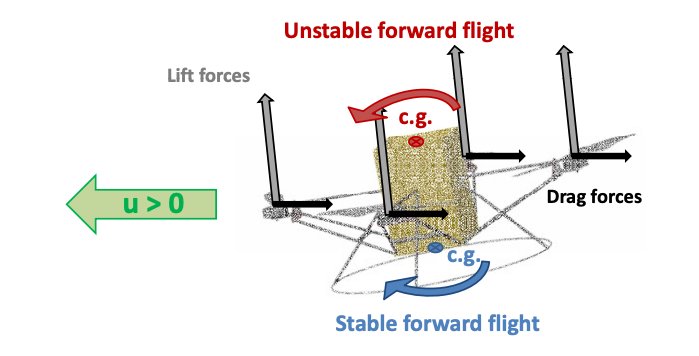
Topzwaar zwaartepunt: verhoogt positiestabiliteit, verlaagt snelheidsstabiliteit
Wanneer het zwaartepunt zich boven het aërodynamische centrum bevindt, neigt de drone naar voren te kantelen als er een windvlaag is. Dit zorgt voor positiestabiliteit, want als de drone naar achteren wordt geduwd, leunt hij van nature naar voren, waardoor de snelheid waarmee hij achteruit accelereert afneemt.
Omdat het zwaartepunt zich echter boven het aerodynamische centrum bevindt, wil de drone bij het vooruitvliegen over zijn AC struikelen en nog verder naar voren komen. Dit betekent dat de voorwaartse snelheid enigszins ondergedempt is, wat resulteert in een minder positieve of zelfs negatieve feedbackcyclus.
Zwaartepunt zwaar onderin: vermindert positiestabiliteit, verhoogt snelheidsstabiliteit
In dit geval bevindt het zwaartepunt zich onder het aërodynamische midden. Wanneer er een plotselinge windstoot is die de drone destabiliseert, kantelt de drone weg van zijn vasthoudpositie, wat in combinatie met de kracht van de windvlaag de positionele fout accentueert.
Maar aan de andere kant heeft de drone de neiging om te wil terug naar de verticale kant werpen, in plaats van over zijn eigen voeten te struikelen. Dit betekent dat de voorwaartse snelheid goed wordt gedempt zonder een positieve feedbackcyclus.
[*] Roll functioneert op precies dezelfde manier, maar het leidt af om elke keer dat we praten 'pitch / roll' te schrijven over een rotatie. [**] Dit is een basisprincipe van aerodynamica en vloeistofstroom, namelijk dat het niet te onderscheiden is of het object door de vloeistof beweegt of de vloeistof rond het object beweegt.